This article will cover the "Hello World" LLRP application in C# .NET Framework 4.6.1. It will show how to setup an Impinj Speedway RAIN RFID reader with minimal configuration and start reading tags. To keep things concise, much of the error handling required in a production application has been omitted.
First, you'll need to download the LLRP Toolkit (LTK) for .NET. It's available at the following link as well as through NuGet.
If using Visual Studio, you can add the NuGet package through the solution explorer by first creating an empty C# application project, and then right clicking on the solution's name and selecting "Manage NuGet Packages..". You should then be able to switch to the 'Browse' tab and search for "Impinj", which should show the following NuGet package listed:
You will then want to click on this NuGet package and select the "Install" button after ensuring you've selected the latest stable version from the dropdown, example shown below:
Assuming you are on .Net Framework 4.6.1 or greater, this should install without issue, and you should now be able to use the Octane LTK libraries in your application to communicate with your Speedway reader.
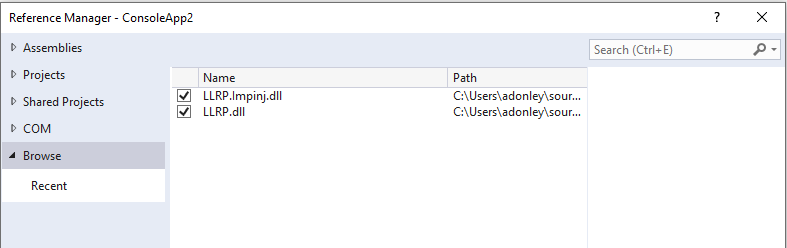
If manually installing the libraries instead, after downloading the libraries to your system, create a new sub-directory called 'lib' in your project and extract these four LTK files to it:
LLRP.dll
LLRP.Impinj.dll
Open up your project in Visual Studio and add references to these libraries by selecting "Project->Add Reference" from the menu. You will need to choose the "Browse" option and navigate to these .dll files in the 'lib' folder you just created.
Add the library import statements at the top of your class.
An ROSpec tells the Speedway reader what data you want to read and when you want to read it. The Speedway readers support one ROSpec on the reader at a time. Before you can add a new ROSpec, you must delete any existing ones. This can be done by sending a DELETE_ROSPEC message.
using Org.LLRP.LTK.LLRPV1;
using Org.LLRP.LTK.LLRPV1.DataType;
using Org.LLRP.LTK.LLRPV1.Impinj;
static void Delete_RoSpec()
{
MSG_DELETE_ROSPEC msg = new MSG_DELETE_ROSPEC();
msg.ROSpecID = 0;
MSG_ERROR_MESSAGE msg_err;
MSG_DELETE_ROSPEC_RESPONSE rsp =
reader.DELETE_ROSPEC(msg, out msg_err, 2000);
if (rsp != null)
{
// Success
Console.WriteLine(rsp.ToString());
}
else if (msg_err != null)
{
// Error
Console.WriteLine(msg_err.ToString());
}
else
{
// Timeout
Console.WriteLine("Timeout Error.");
}
}
Now you can add a new ROSpec using the ADD_ROSPEC message.
static void Add_RoSpec()
{
MSG_ERROR_MESSAGE msg_err;
MSG_ADD_ROSPEC msg = new MSG_ADD_ROSPEC();
// Reader Operation Spec (ROSpec)
msg.ROSpec = new PARAM_ROSpec();
// ROSpec must be disabled by default
msg.ROSpec.CurrentState = ENUM_ROSpecState.Disabled;
// The ROSpec ID can be set to any number
// You must use the same ID when enabling this ROSpec
msg.ROSpec.ROSpecID = 123;
// ROBoundarySpec
// Specifies the start and stop triggers for the ROSpec
msg.ROSpec.ROBoundarySpec = new PARAM_ROBoundarySpec();
// Immediate start trigger
// The reader will start reading tags as soon as the ROSpec
// is enabled
msg.ROSpec.ROBoundarySpec.ROSpecStartTrigger =
new PARAM_ROSpecStartTrigger();
msg.ROSpec.ROBoundarySpec.ROSpecStartTrigger
.ROSpecStartTriggerType = ENUM_ROSpecStartTriggerType.Immediate;
// No stop trigger. Keep reading tags until the ROSpec is disabled.
msg.ROSpec.ROBoundarySpec.ROSpecStopTrigger =
new PARAM_ROSpecStopTrigger();
msg.ROSpec.ROBoundarySpec.ROSpecStopTrigger.ROSpecStopTriggerType =
ENUM_ROSpecStopTriggerType.Null;
// Antenna Inventory Spec (AISpec)
// Specifies which antennas and protocol to use
msg.ROSpec.SpecParameter = new UNION_SpecParameter();
PARAM_AISpec aiSpec = new PARAM_AISpec();
aiSpec.AntennaIDs = new UInt16Array();
// Enable all antennas
aiSpec.AntennaIDs.Add(0);
// No AISpec stop trigger. It stops when the ROSpec stops.
aiSpec.AISpecStopTrigger = new PARAM_AISpecStopTrigger();
aiSpec.AISpecStopTrigger.AISpecStopTriggerType =
ENUM_AISpecStopTriggerType.Null;
aiSpec.InventoryParameterSpec =
new PARAM_InventoryParameterSpec[1];
aiSpec.InventoryParameterSpec[0] =
new PARAM_InventoryParameterSpec();
aiSpec.InventoryParameterSpec[0].InventoryParameterSpecID = 1234;
aiSpec.InventoryParameterSpec[0].ProtocolID =
ENUM_AirProtocols.EPCGlobalClass1Gen2;
msg.ROSpec.SpecParameter.Add(aiSpec);
// Report Spec
msg.ROSpec.ROReportSpec = new PARAM_ROReportSpec();
// Send a report for every tag read
msg.ROSpec.ROReportSpec.ROReportTrigger =
ENUM_ROReportTriggerType.Upon_N_Tags_Or_End_Of_ROSpec;
msg.ROSpec.ROReportSpec.N = 1;
msg.ROSpec.ROReportSpec.TagReportContentSelector =
new PARAM_TagReportContentSelector();
MSG_ADD_ROSPEC_RESPONSE rsp =
reader.ADD_ROSPEC(msg, out msg_err, 2000);
if (rsp != null)
{
// Success
Console.WriteLine (rsp.ToString());
}
else if (msg_err != null)
{
// Error
Console.WriteLine (msg_err.ToString());
}
else
{
// Timeout
Console.WriteLine("Timeout Error.");
}
}
When an ROSpec is added, it is disabled by default. Before it can be used, it must be enabled with the ENABLE_ROSPEC message.
static void Enable_RoSpec()
{
MSG_ERROR_MESSAGE msg_err;
MSG_ENABLE_ROSPEC msg = new MSG_ENABLE_ROSPEC();
msg.ROSpecID = 123;
MSG_ENABLE_ROSPEC_RESPONSE rsp =
reader.ENABLE_ROSPEC(msg, out msg_err, 2000);
if (rsp != null)
{
// Success
Console.WriteLine (rsp.ToString());
}
else if (msg_err != null)
{
// Error
Console.WriteLine (msg_err.ToString());
}
else
{
// Timeout
Console.WriteLine("Timeout Error.");
}
}
Since we set our ROSpec start trigger type to "immediate", the Speedway reader will begin reading tags as soon as the ENABLE_ROSPEC message is sent. In order to receive tag reports you must specify an event handler to call when data is ready. Here's an example of what that function should look like.
static void OnReportEvent(MSG_RO_ACCESS_REPORT msg)
{
// Loop through all the tags in the report
for (int i = 0; i < msg.TagReportData.Length; i++)
{
if (msg.TagReportData[i].EPCParameter.Count > 0)
{
string epc;
// Two possible types of EPC: 96-bit and 128-bit
if (msg.TagReportData[i].EPCParameter[0].GetType() ==
typeof(PARAM_EPC_96))
{
epc = ((PARAM_EPC_96)
(msg.TagReportData[i].EPCParameter[0]))
.EPC.ToHexString();
}
else
{
epc = ((PARAM_EPCData)
(msg.TagReportData[i].EPCParameter[0]))
.EPC.ToHexString();
}
Console.WriteLine("epc = " + epc);
}
}
}
Now that we have all of the basic functions written, let's write the main function that will connect to the reader and send all of the messages.
static LLRPClient reader;
static void Main(string[] args)
{
// Create a LLRPClient instance.
reader = new LLRPClient();
/*
Connect to the reader.
Replace "SpeedwayR-10-25-32" with your reader's hostname.
The second argument (2000) is a timeout value in milliseconds.
If a connection cannot be established within this timeframe,
the call will fail.
*/
ENUM_ConnectionAttemptStatusType status;
reader.Open("SpeedwayR-10-25-32", 2000, out status);
// Check for a connection error
if (status != ENUM_ConnectionAttemptStatusType.Success)
{
// Could not connect to the reader.
// Print out the error
Console.WriteLine(status.ToString());
// Do something here.
// Your application should not continue.
return;
}
/*
If you successfully connect to the reader, the next step is to
create a delegate. The delegate determines which function gets
called when a report event occurs.
*/
reader.OnRoAccessReportReceived += new
delegateRoAccessReport(OnReportEvent);
// Send the messages
Delete_RoSpec();
Add_RoSpec();
Enable_RoSpec();
// Keep reading tags until the user presses return
Console.ReadLine();
// Cleanup the reader by deleting the ROSpec
Delete_RoSpec();
}
No comments:
Post a Comment